來源:科技日報 文中視頻及圖片均來自《自然·通訊》
轉載:直觀學機械
要力氣時可以捏扁罐頭,要精細時可以拿起小鑷子,擁有這般“男友力”的其實是一支機械手。
據英國《自然·通訊》雜志14日發表的一項研究,韓國科學家團隊報告了一種集成了響應式運動、傳感并擁有高度靈活性所需所有組件的機械手。這種機械手可以安裝到現有商業機械手臂上,執行從抓握雞蛋到使用剪刀和鑷子等各種各樣的任務。
人體全部206塊骨骼中,有54塊在手上,相當于骨骼總數的四分之一,而驅動這些骨骼的手部肌肉結構也極其復雜。正因如此,人類手的運動看似平常,卻涉及相當高的靈巧水平,從精細物體的抓取到繁復工具的操作,人手能執行多種任務。而解釋人手極其復雜的功能,迄今為止仍然是一個尚未解決的挑戰。

機器人的手與人類的手有著相似的功能,因此在執行任務時也可以具有很高的靈活性。實際應用中,機械手有執行跨度很大的任務的潛力。但是,開發沒有額外驅動部件使之移動,并保持高度靈活性或以適當力量抓取的能力的機械手,是一個巨大挑戰。
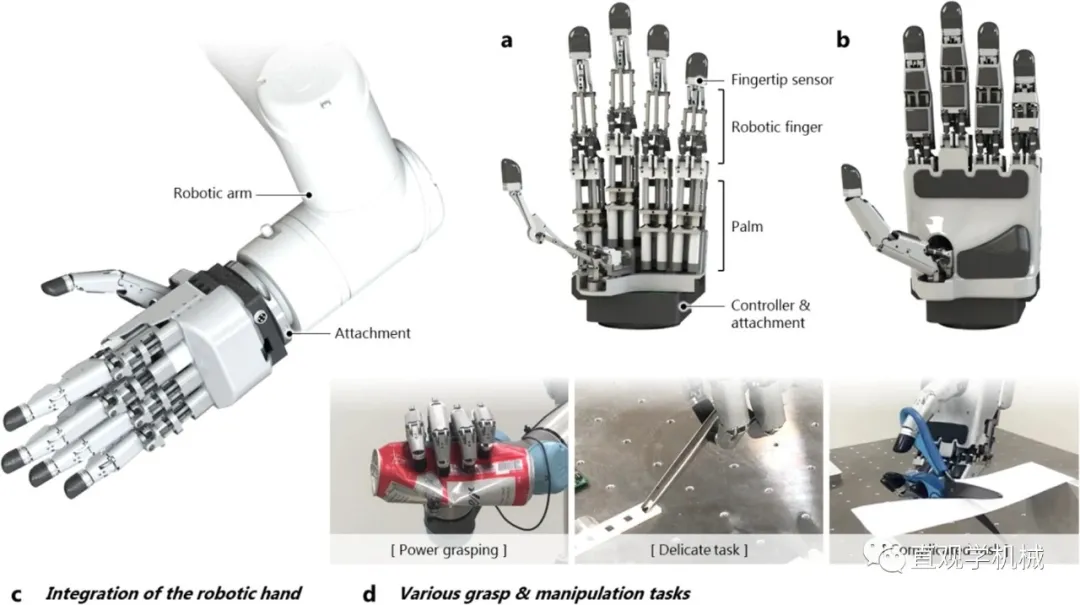
“ILDA”概覽圖。
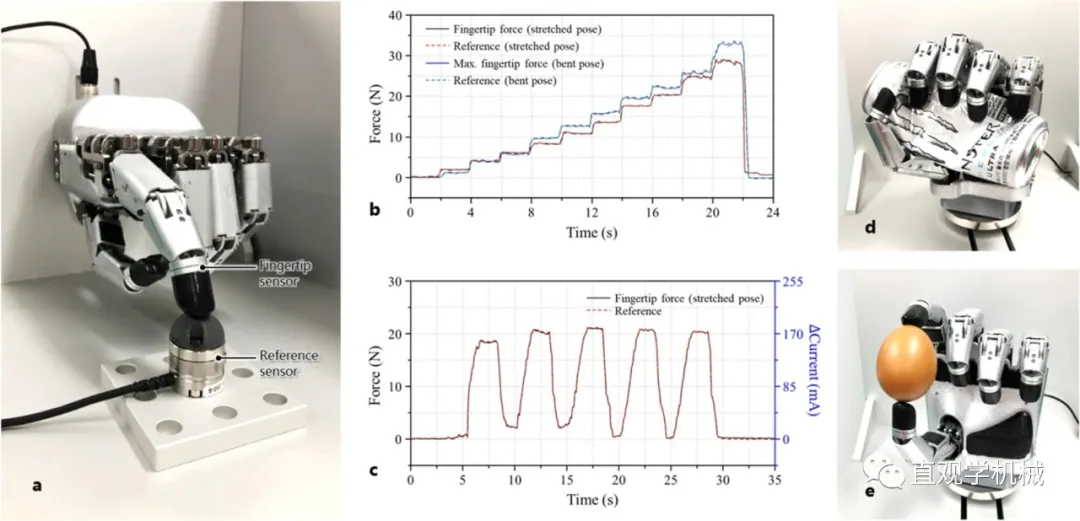
韓國亞洲大學科學家團隊此次開發的這種靈活的機械手,稱為“ILDA”(集成連接驅動的靈活擬人)。這只手由20個關節組成,允許15度自由移動,指尖力34牛頓,總重不到1.1公斤,體積小巧(218毫米),有觸覺傳感能力。

研究人員表示,“ILDA”的所有組件都集成到了手上,這意味著它可以無須額外部件(如前臂)就能連接到現有的機械臂上。而一系列實驗表明,這只手可以拿起各種形狀的物體,強力抓握可壓扁罐頭,或精細抓握住一個雞蛋。這只手還可以用剪刀裁紙以及用鑷子拿起小物體。

機械手指運動結構。
輕輕拿起一顆雞蛋,既不會用力過度捏爆它,也不會力道過輕把它摔地上,對人類來說是與生俱來的本領,對機器人來說卻是個大挑戰。“ILDA”成功做到了這一點,表明該機械手在觸覺傳感、反饋機制、精細操作等方面有了巨大進步。
ILDA手的各種動作。來源:Kimet al.
我們常說機器“笨拙”,就是因為機器手干不了太過精細的活。你可以給它們設定程序,讓它們寫字畫畫,但自如抓握,控制力道,依然還是欠點火候。人手是精妙的工具,因為它有復雜的結構。從手臂到手肘到手掌再到手指,骨頭,肌肉,肌腱,互相關聯,彼此協作。要把這一切搬到機器手上可就太難了——體積不能太大,傳感器得足夠多,結構也要夠靈活……心有猛虎,細嗅薔薇,說來容易,讓機器辦到,則是對人類的一大考驗。不過,現在看來,人類又完成了一項挑戰。
原文鏈接:https://mp.weixin.qq.com/s?__biz=MzAxODA0Mzk1NA==&mid=2650847281&idx=2&sn=6c6535e5f8f668b2d24b469a848317b9&chksm=80285d6cb75fd47abf74af3f8aa77a954a4a3a051fdcc6c5928bf7074b4e1c31b5ce1cbab9b6&mpshare=1&scene=1&srcid=1217U80dNmzDNr3vtW3Fks1F&sharer_sharetime=1639699916597&sharer_shareid=0e5ee6025d471aaa82015ce5a28fd3d4#rd